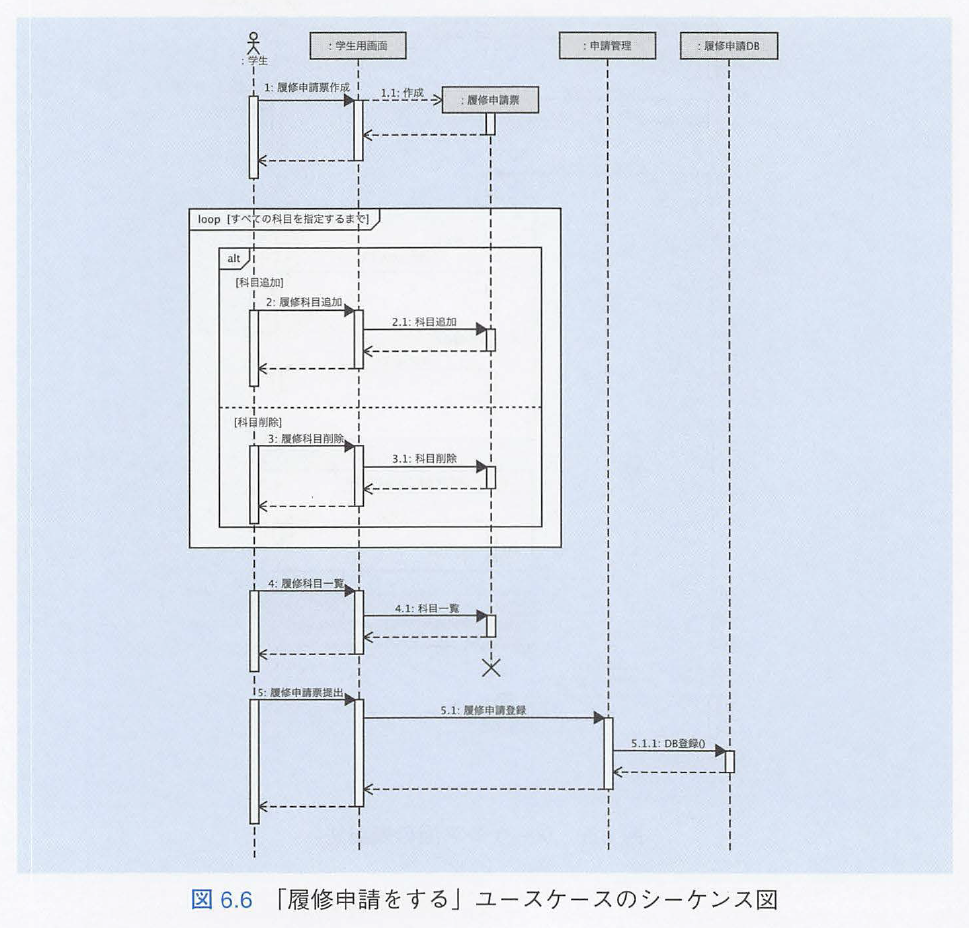
ユースケース1つに1つのシーケンス図を描いてみる
P.94中~
ここまでに抽出してきたオブジェクトを見直すきっかけにもなる
P.95上~
1つのライフラインに着目して(後に)ステートマシン図を描く
モデリングの精度を上げるために別の視点からチェックする
P.95下~
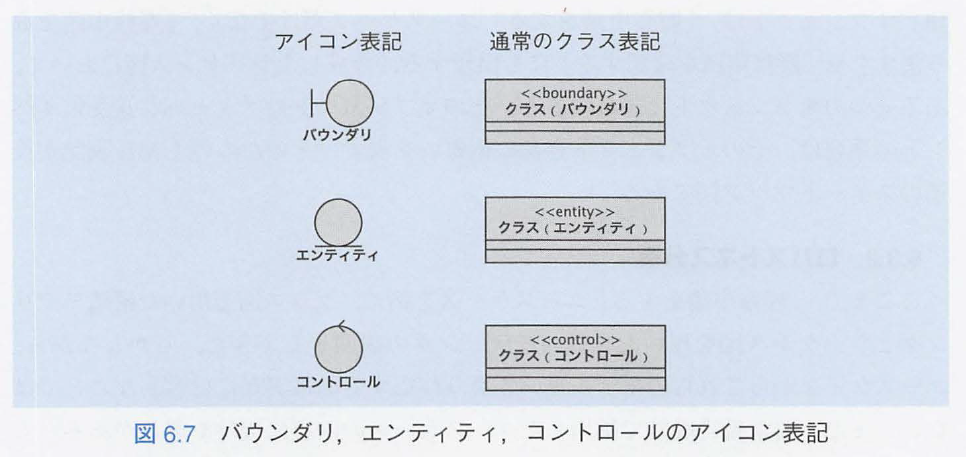
ロバストネス図: バウンダリ、エンティティ、コントロール からなる
P.95下~
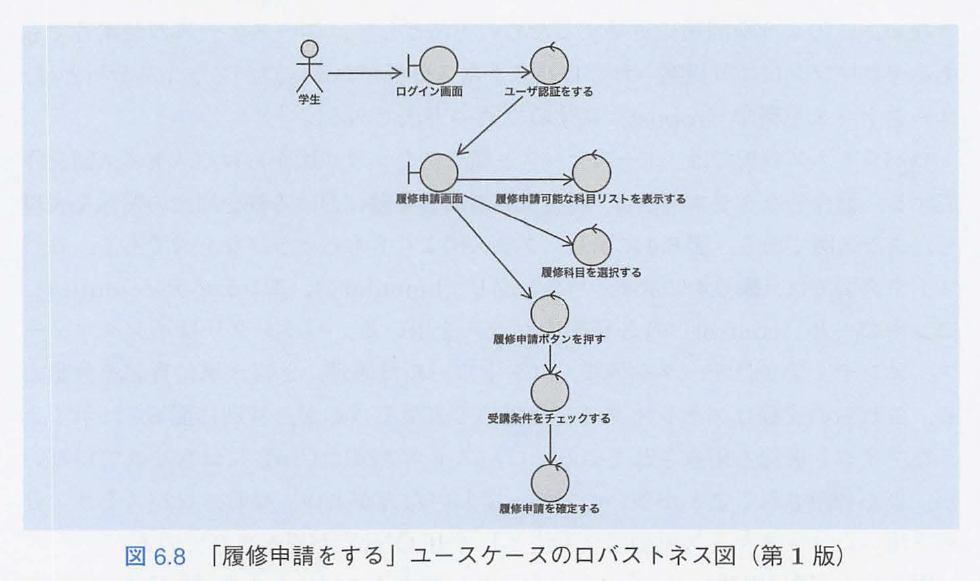
P.97上~
必要となりそうなエンティティがないか?
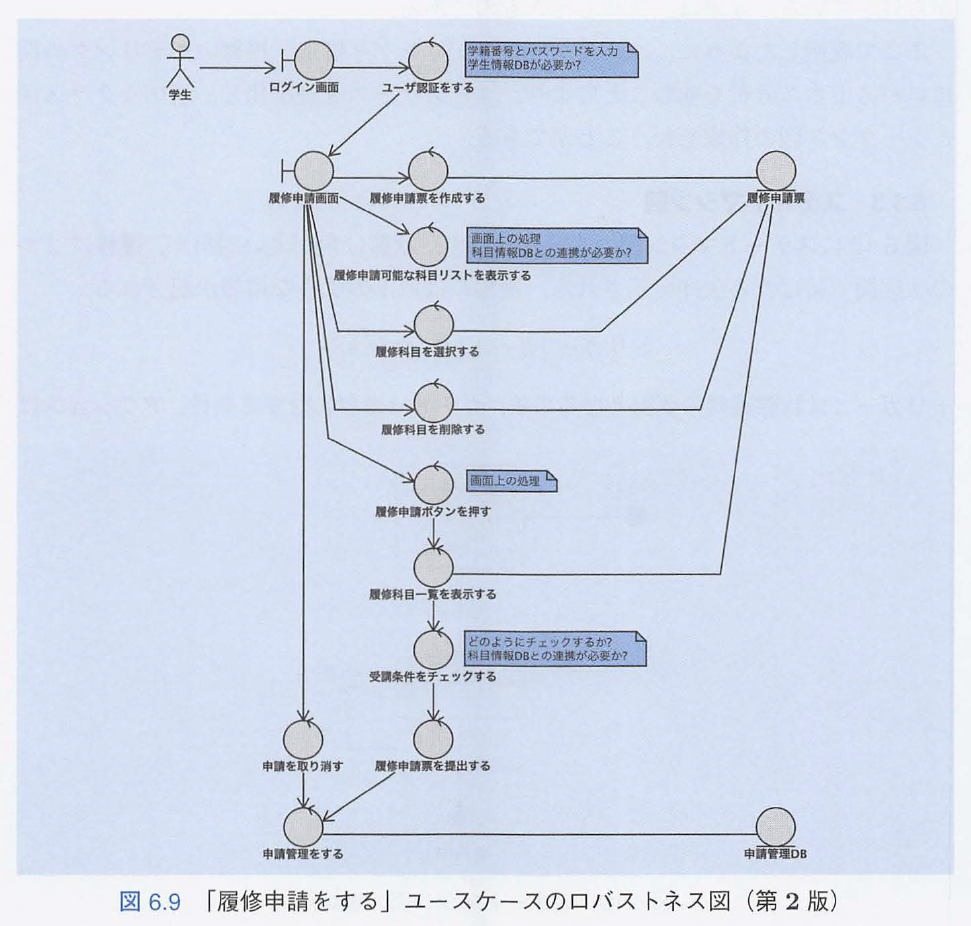
P.98上~
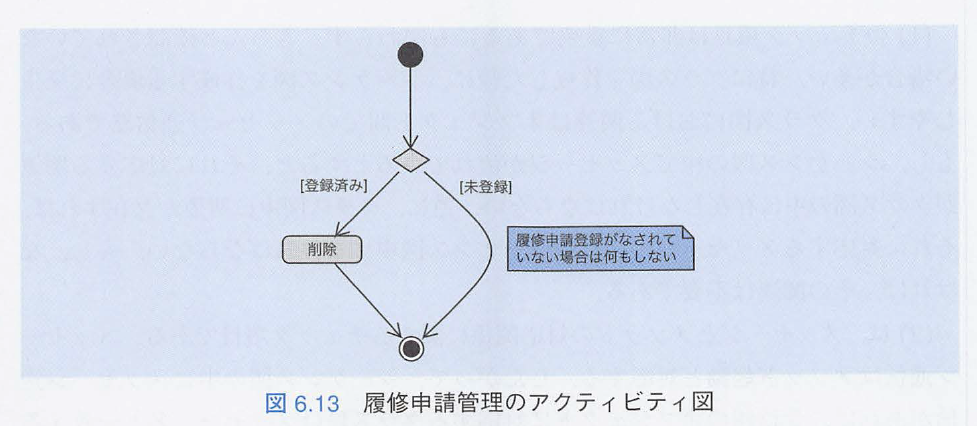
作成したロバストネス図を元にクラス図、シーケンス図を見直す
P.99中~
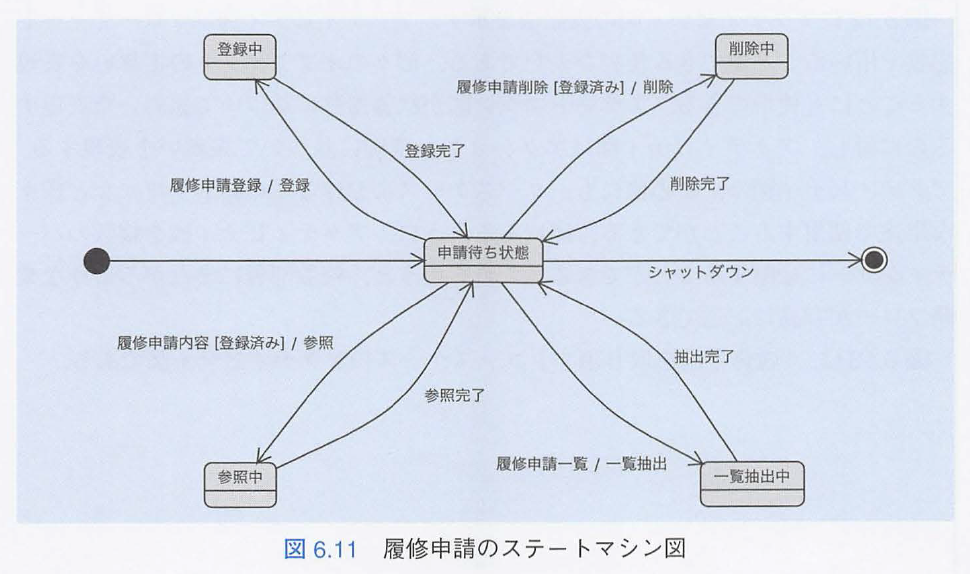
シーケンス図は複数オブジェクト間の振舞いを、ステートマシン図は1つのオブジェクトの振舞いを表す(とよい)
P.100上~
シーケンス図: ユースケースに近い
ステートマシン図: プログラムに近い
(1)関連←→メッセージ
(2)メソッド←→メッセージ
(3)ライフライン⊃クラス
(4)ライフライン⊃アクター
(5)クラス∋メソッド
P.103中~
それぞれの図を整合させる
後工程になるほど手戻りは大変 → 急がば回れ
レポート6
教科書(図はすべてこちらより引用):
鵜林尚靖,「レクチャー ソフトウェア工学」, 数理工学社